
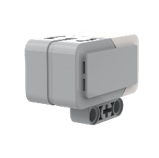
觸碰感測器
- 可以偵測感測器是否壓下、鬆開或是碰撞了觸碰感應器
- 主要判別為壓下 (數值為1),及無壓下 (數值為0),常被使用為程式中的開關鈕

顏色感測器
- 可以感測7種樂高常見顏色和沒有顏色(黑、藍、綠、 黃、紅、白 、棕)
- 感測速度: 每秒1000次 (1kHz)
- 感測距離: 15 to 50 mm

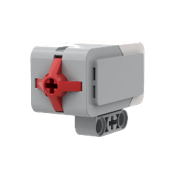
中馬達
- 最高轉速: 240 – 250 RPM (每秒超過4圈)
- 角度編碼器誤差: +/- 1度
- 扭力: 0.08 N*m
- 重量: 36g
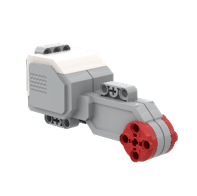
大馬達
- 最高轉速: 160 – 170 RPM (每秒接近3圈)
- 角度編碼器誤差: +/- 1度
- 扭力: 0.21 N*m
- 重量: 76g
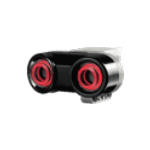
超音波感測器
- 感測距離: 3cm to 250cm (實際量測約1~160cm)
- 感測角度: 20度
- 誤差: 約為1cm
- 左方發射訊號 , 右方接收訊號
陀螺儀感測器
- 感測能力: 每秒最高440度 (一秒轉動1.22圈內可以捉到位置)
- 感測器誤差: +/-3度
- 感測速度: 每秒1000次 (1kHz)
SPIKE 科創機器人
適合年齡 8+

VEX-V5 高階機器人
適合年齡 13+
